We aim to develop a low-cost and lightweight wearable Powered Orthotic Devices (POD) for upper limbs using a new emerging type of actuators: Carbon Fiber (CF)-based Twisted and Coiled Artificial Muscles (TCAMs) [1]. These strong artificial muscles, that can lift up to 12,600 times their own weight and can be produced with less than one cent of dollar, require an extremely low electrical input (only 0.02 V/cm) to be actuated and eliminate the need for heavy and noisy power sources. In particular, we work on:
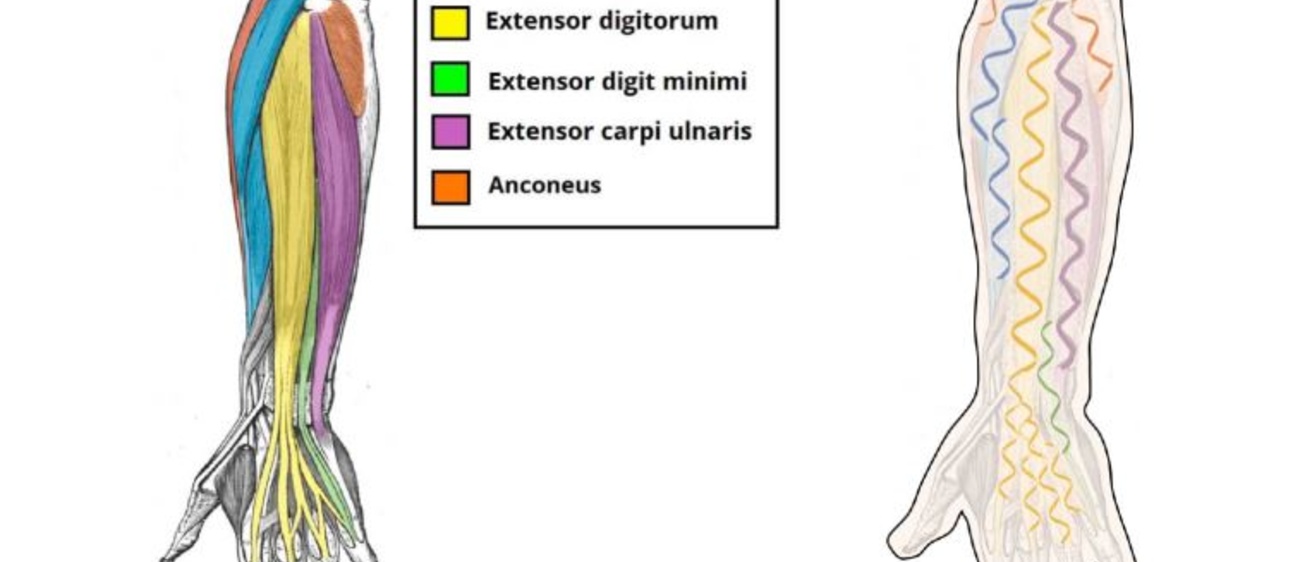
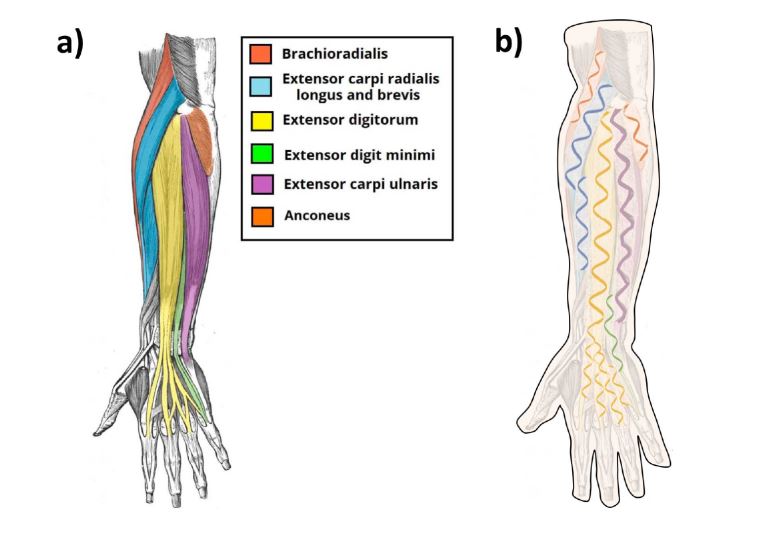
1. Device Design and Manufacturing: we are designing a POD by emulating the arrangement and the working mechanism of skeletal human muscles. Thanks to their reduced size and high strength, a large number of TCAMs will be used to reproduce fine anthropomorphic motions and potentially activate all the joints contained in the upper limbs, from the shoulder to the fingertips.
2. Device Motion Planning and Control: we develop control algorithms to enable PODs to execute desired tasks while adhering to human motion principles. The algorithms is scalable, i.e. robust and computationally efficient, even for highly complex systems involving a large number of actuators.
[1] C. Lamuta, S. Messelot, and S. Tawfick, “Theory of the tensile actuation of fiber reinforced coiled muscles,” Smart Materials and Structures, vol. 27, no. 5, p. 055018, 2018.