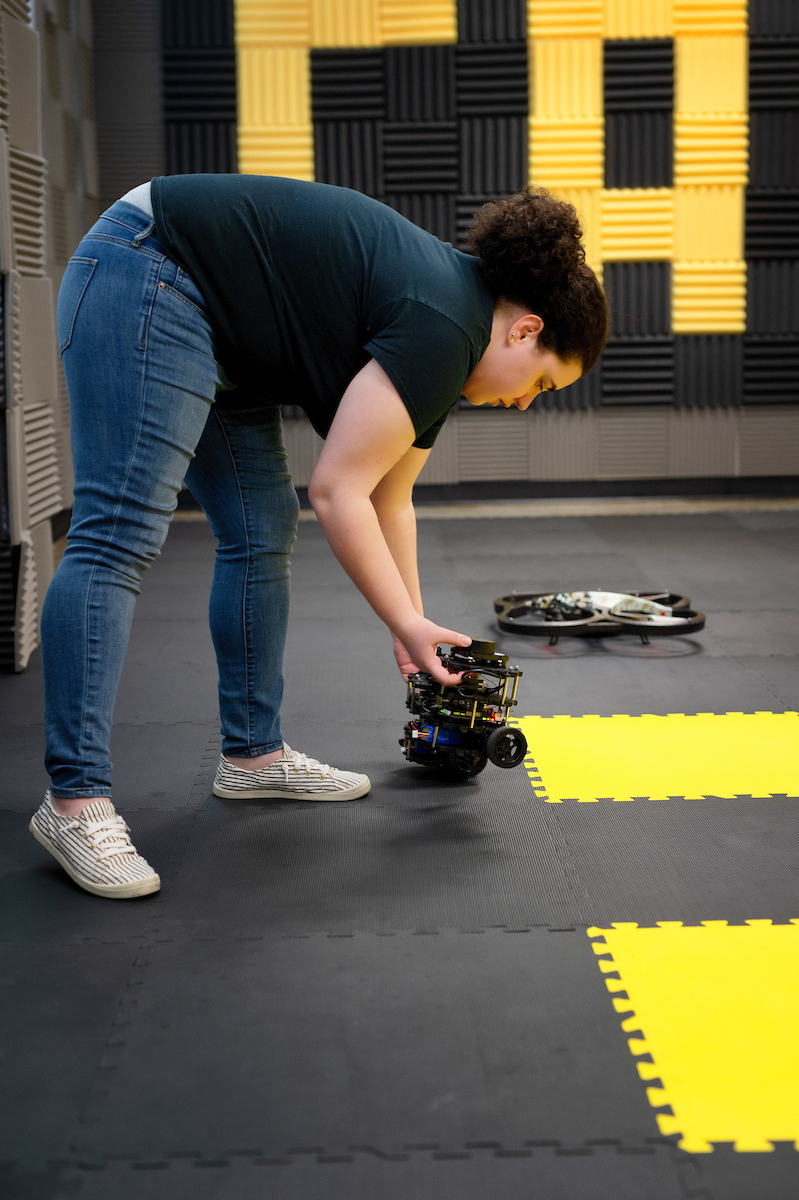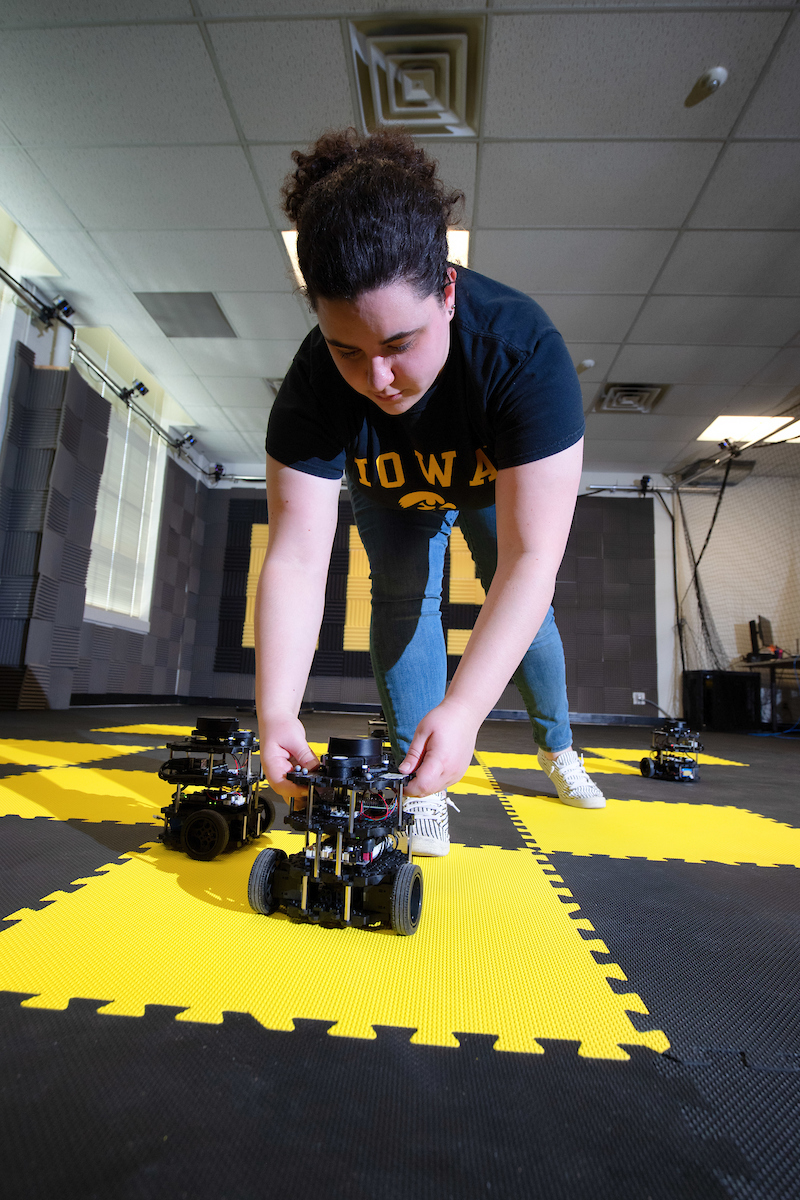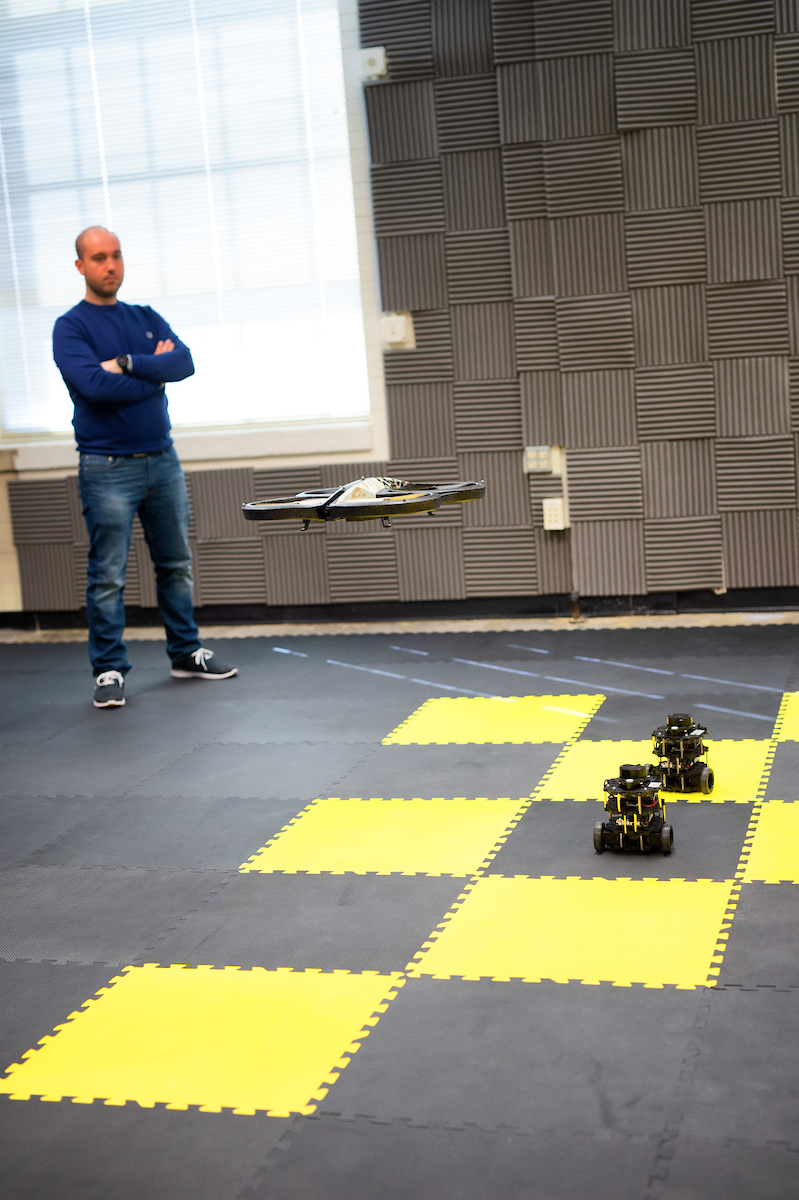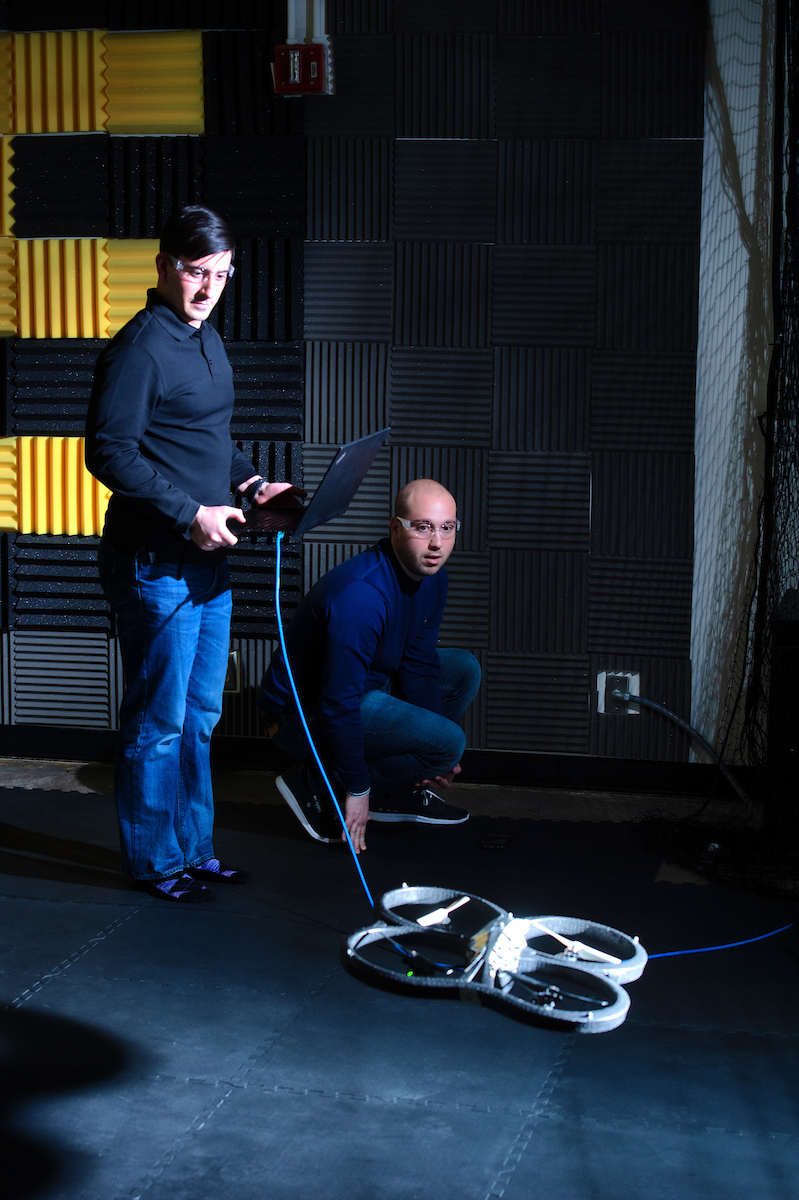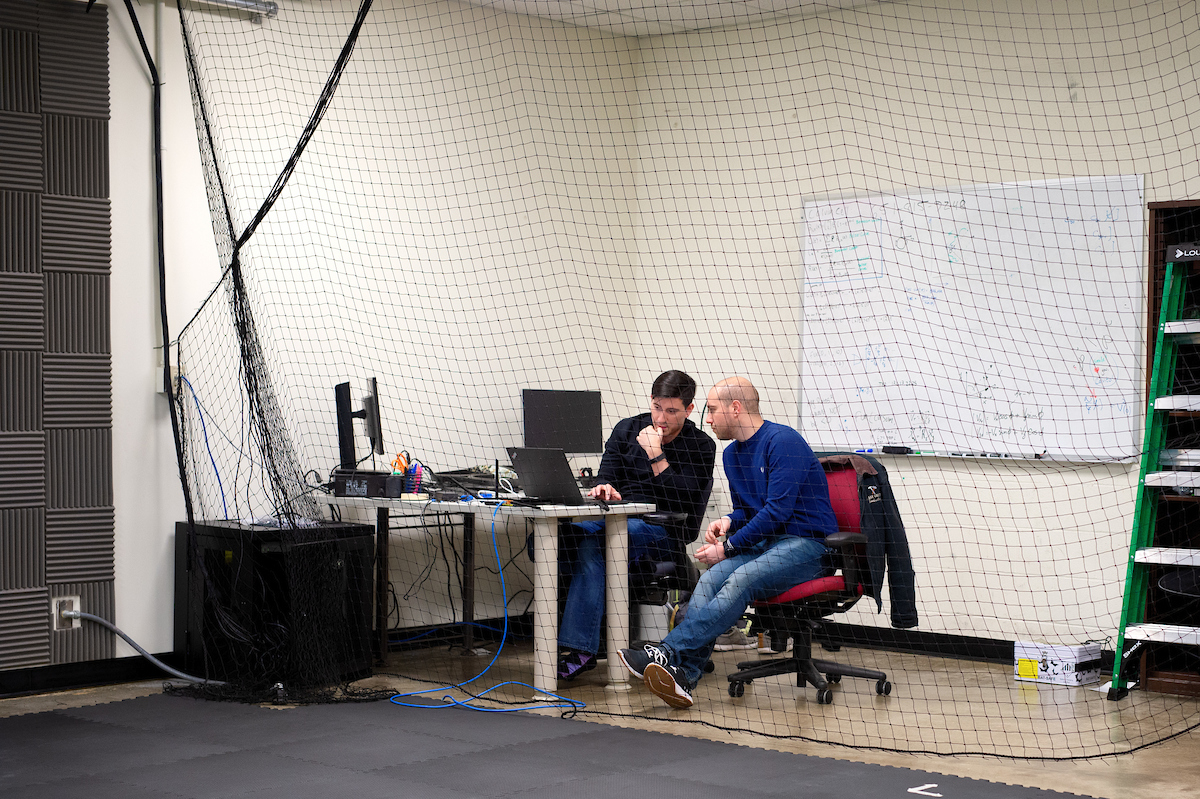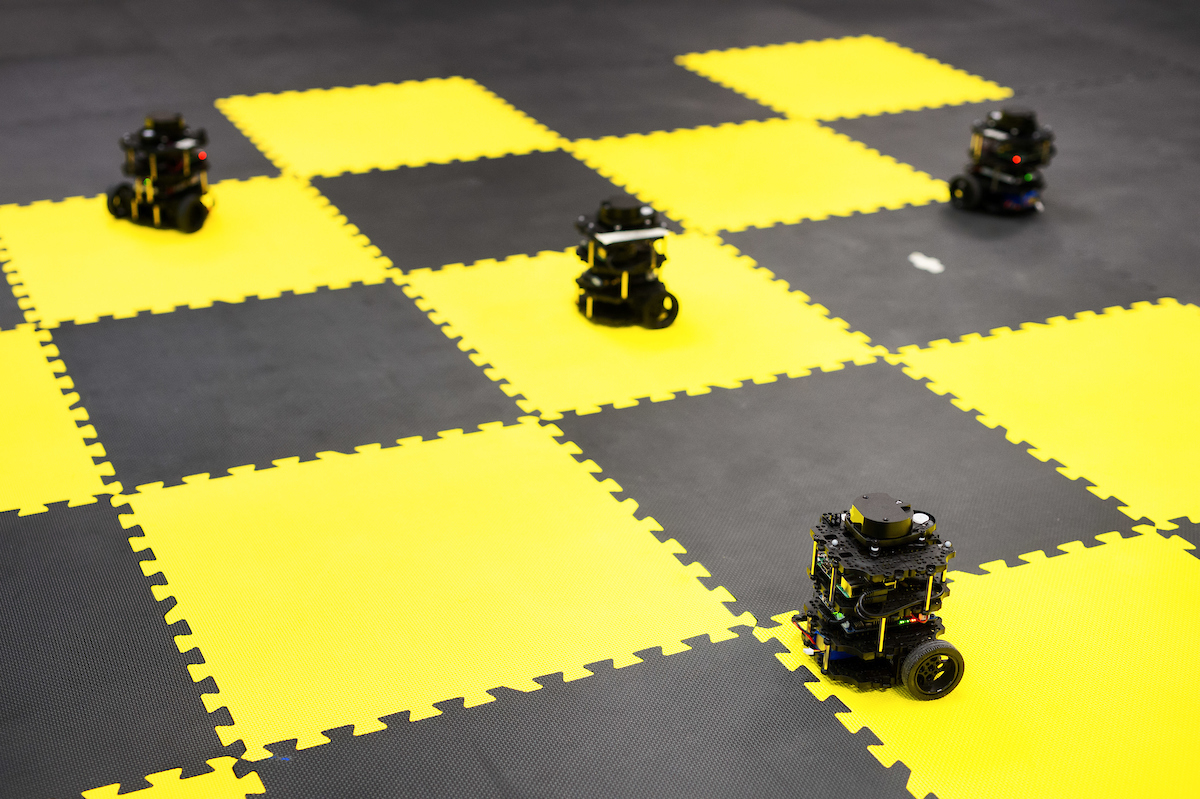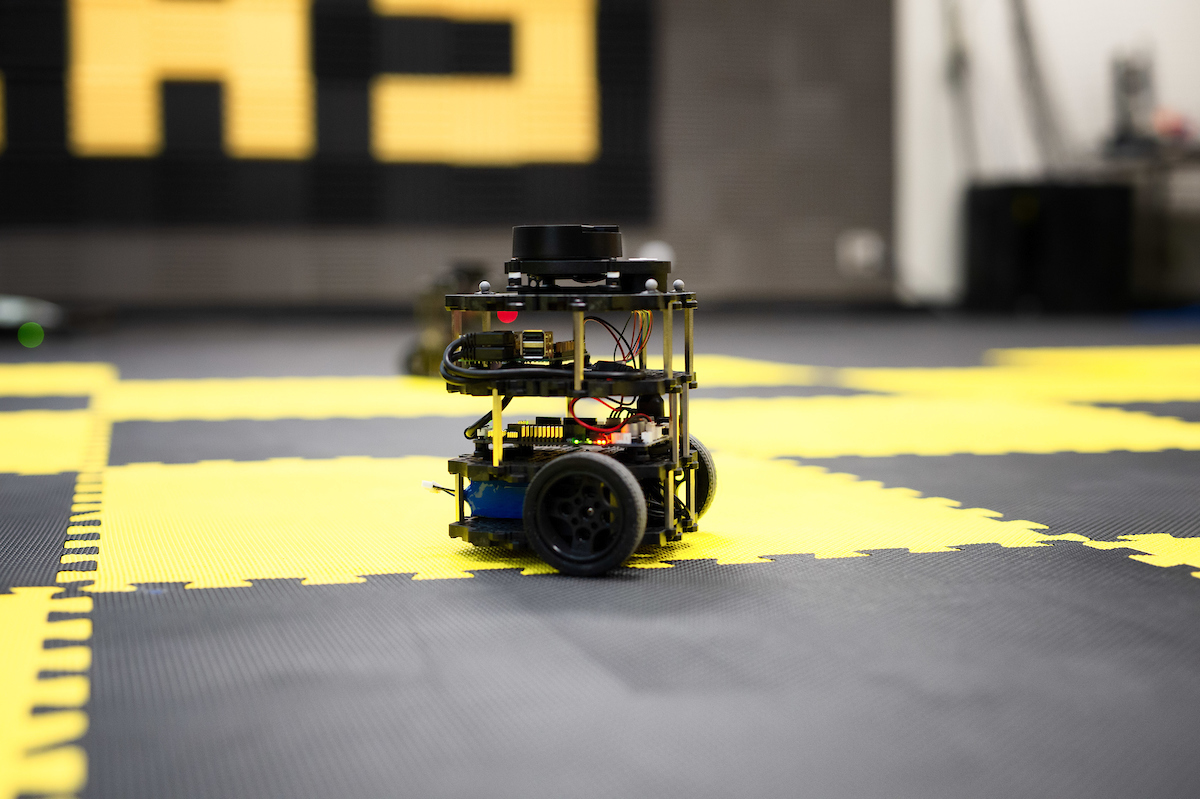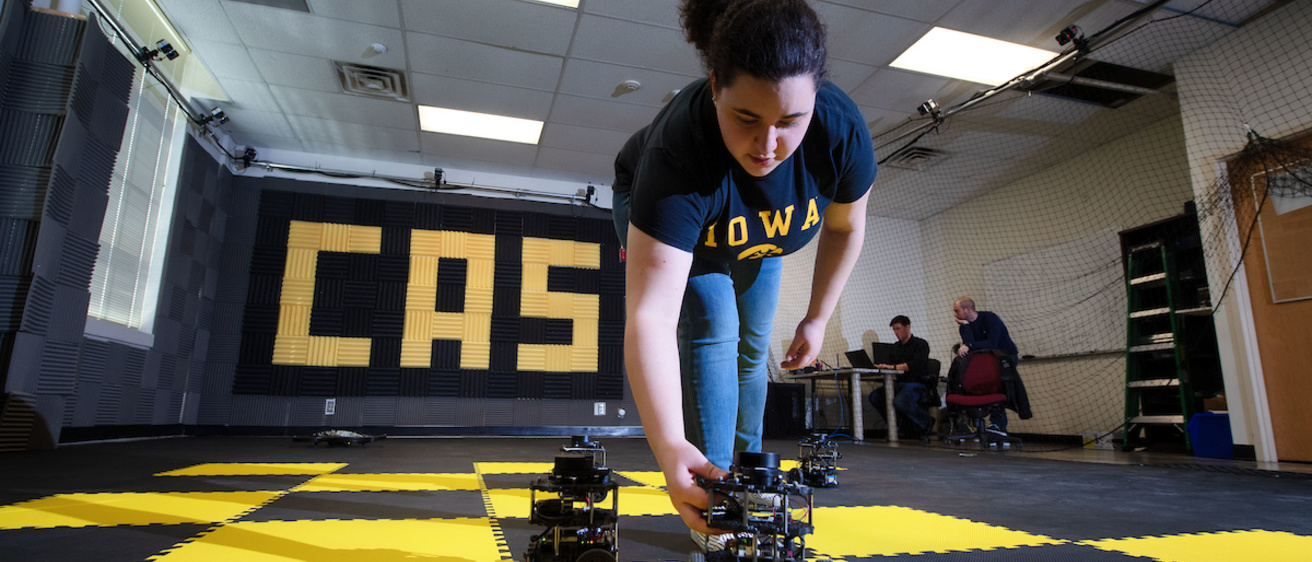
The Cooperative Autonomous Systems (CAS) Lab focuses on controlling multiple autonomous vehicles in real time. The facility is equipped with a state-of-the-art motion capture system, which provides GPS data with sub-millimeter accuracy. It also contains a handful of different quadrotor UAVs and ground robots. The lab provides an excellent educational and research environment for students to design, implement, and test autonomous system planning and control algorithms.
Safety is a main concern in the lab. When in use, the autonomous vehicles are contained within a large area that is closed off using a net. Our lab plans on avoiding any potential Skynet disasters!
The CAS Lab is being updated every day to provide the best possible tools to undergraduate and graduate students and researchers. In the future, the lab will house many more robots for testing large swarms of autonomous vehicles. Continuous improvements upon the technology used in the lab will guarantee that it remains at the cutting edge of research.