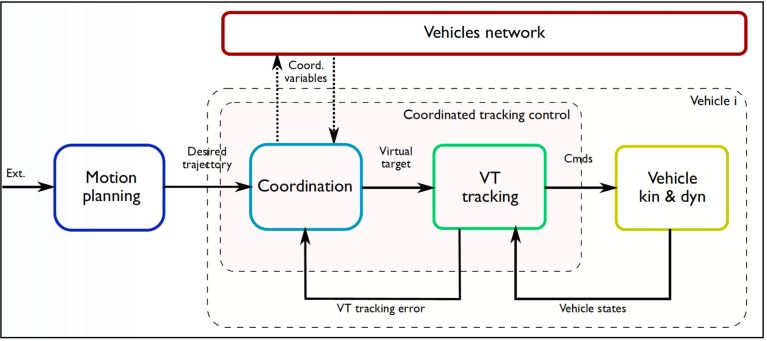
Worldwide, there has been growing interest in the development of algorithms that enable heterogeneous autonomous vehicles to execute missions in a cooperative fashion. The use of a cooperative group of vehicles, rather than a single heavily equipped vehicle, provides robustness to system failures, increases system overall reliability, and improves mission efficiency. However, despite significant progress in cooperative control, several problems remain to be addressed in order to enable safe and robust execution of multiple vehicle missions in the presence of vehicles failures, communication faults, complex environment and vehicle dynamics. At the CAS-Lab, in collaboration with the University of Illinois at Urbana-Champaign (UIUC, Urbana, IL), the Naval Postgraduate School (NPS, Monterey, CA), and the Instituto Superior Técnico (IST, Lisbon, Portugal) we develop, implement and test optimal trajectory generation, cooperative path-following, and collision avoidance strategies that address these challenges. These three strategies are seamlessly integrated into a general framework for planning and control of cooperative autonomous vehicles, depicted in Figure 1, which guarantees safety and robustness in multiple vehicle missions.
In particular, our work focuses on the following areas of research:
- Optimal trajectory generation
- Coordinated tracking
- Collision avoidance
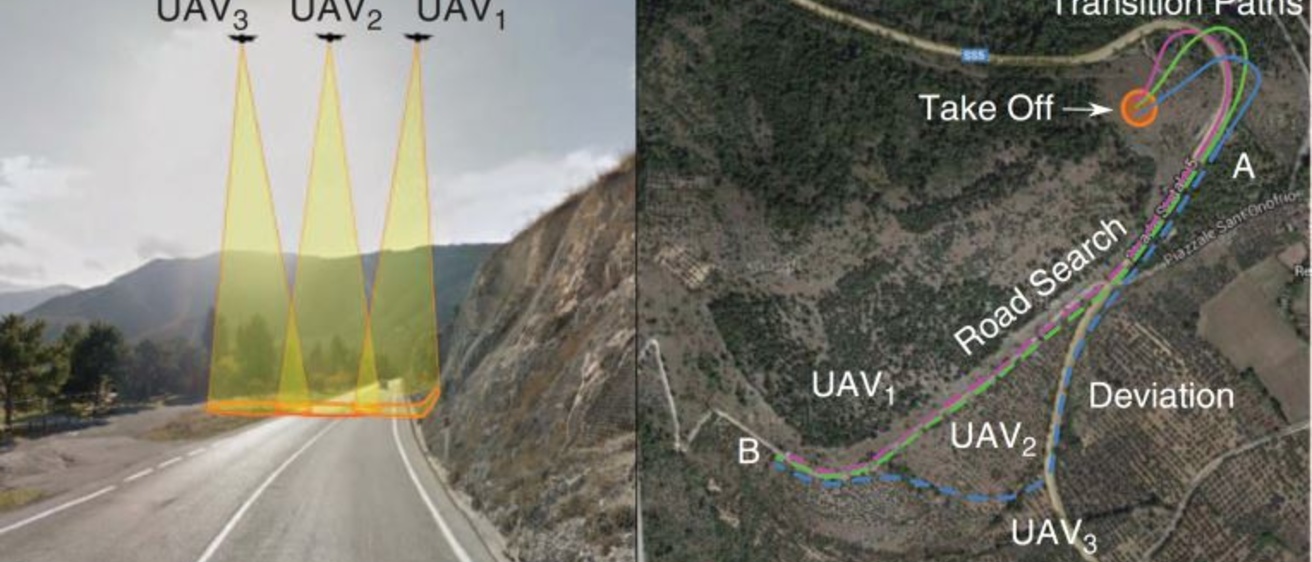
- Cooperative vision-based tracking