Cooperative Autonomous Systems
At the CAS-Lab we work on the development, implementation and testing of cooperative planning and control strategies for the safe execution of multiple autonomous vehicles missions in real-world environment.
Robust and Adaptive Control
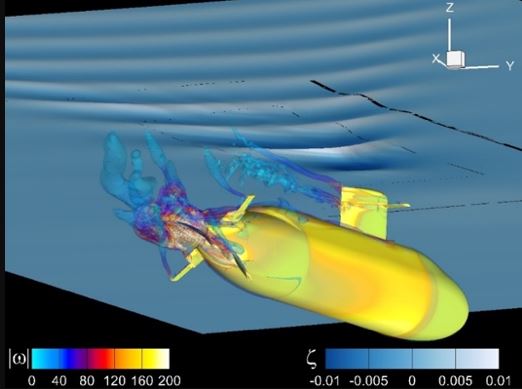
We focus on the design and testing of inner-loop adaptive controllers for the execution of complex maneuvers of underwater vehicles.
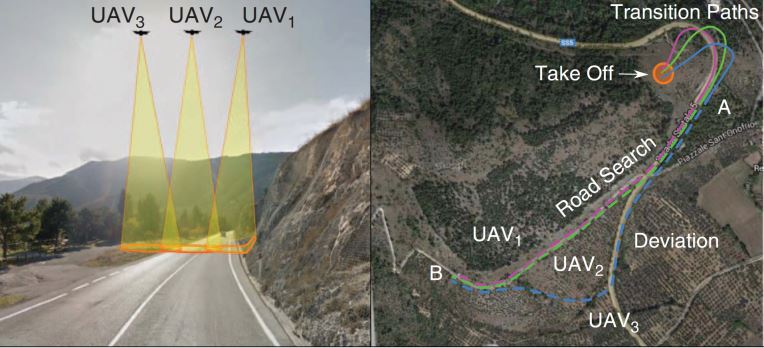
Optimal Motion Planning
We work on the development and implementation of solutions to optimal motion planning problems for multiple autonomous vehicle missions.